
Your first personal robot
Open-source. Full-stack. In your hands.
$16,000$10,999 second batch pricing
Limited quantity • Ships December 2025
Robust to external forces
Using reinforcement learning policies trained for millions of hours in simulation.
Hardware that is extensible by design
Modular and customizable, K-Bot is designed to be upgraded for any use case.
Connect and control K-Bot from anywhere
Internet-connected and ready to be deployed in any environment.
Designed for the futureMade in America
Modular sensor and compute suite
Easily upgrade to next-generation sensors and compute, instead of throwing your robot in the trash.


Adaptable end effector design
Equip your robot with one of our supported end effectors, or design your own for custom applications.
Build Full Autonomy alongside us
Help ensure it's maximally beneficial for humanity
Initial Release
Basic locomotion, balance control, voice commands, and app-based control with predefined command set.
Basic Robotics Stack
Vision-Language-Action (VLA) integration enabling natural language task execution via text commands.
Full Autonomy (Alpha)
Unified perception-speech-action model with on-device inference. Limited temporal horizon, approximately 1 intervention per minute.
Full Autonomy (Beta)
General-purpose task execution with long-horizon planning. "Ask me anything" capability. Fewer than 1 intervention per 10 minutes.
Full Autonomy
Independent operation with less than 1 human intervention per day.
Initial Release
Basic locomotion, balance control, voice commands, and app-based control with predefined command set.
Basic Robotics Stack
Vision-Language-Action (VLA) integration enabling natural language task execution via text commands.
Full Autonomy (Alpha)
Unified perception-speech-action model with on-device inference. Limited temporal horizon, approximately 1 intervention per minute.
Full Autonomy (Beta)
General-purpose task execution with long-horizon planning. "Ask me anything" capability. Fewer than 1 intervention per 10 minutes.
Full Autonomy
Independent operation with less than 1 human intervention per day.
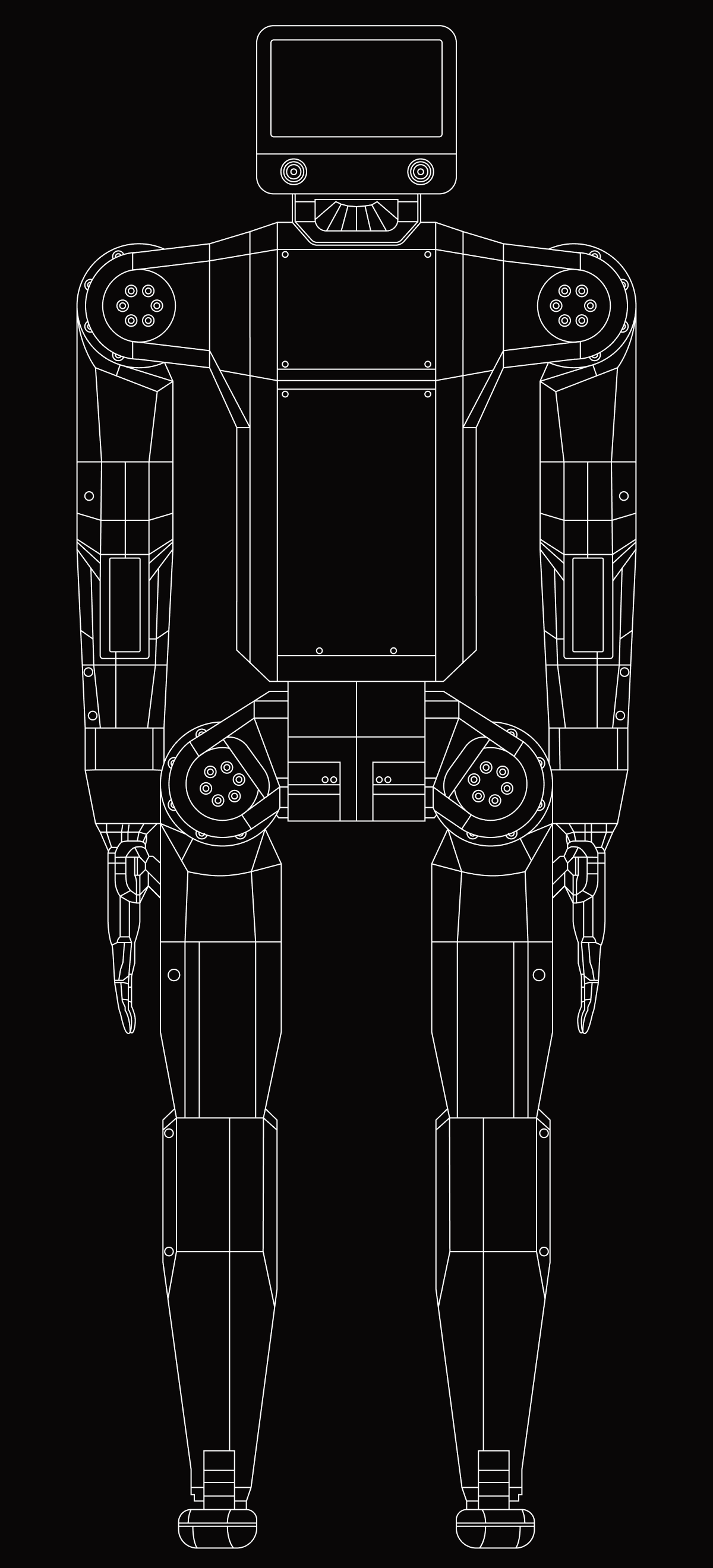
A single platform for physical AI
K-Bot ships with all the hardware required for manipulation and locomotion in unstructured, human-scale environments.
Specifications
Height
4'7" / 1.4m
Weight
77 lbs / 34 kg
Max payload
22 lbs / 10 kg
Battery life
Up to 4 hours
Camera
RGB, Stereo Vision, Ultra-wide FOV
Audio
Far-field microphones, stereo speakers
“The open-source robotics startup that caught OpenAI's eye”
Technical Videos
K-Bot Hardware Teardown
K-Scale Software Overview
RL for Robotics Deep Dive
Frequently Asked Questions
Got questions? We've got answers. Need more details? Join our Discord and chat directly with our engineers.
